ସ୍ୱୟଂଚାଳିତ ସକ୍ରିୟ ମାପକ ଯନ୍ତ୍ର
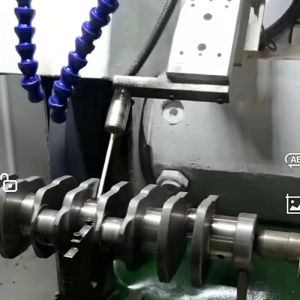
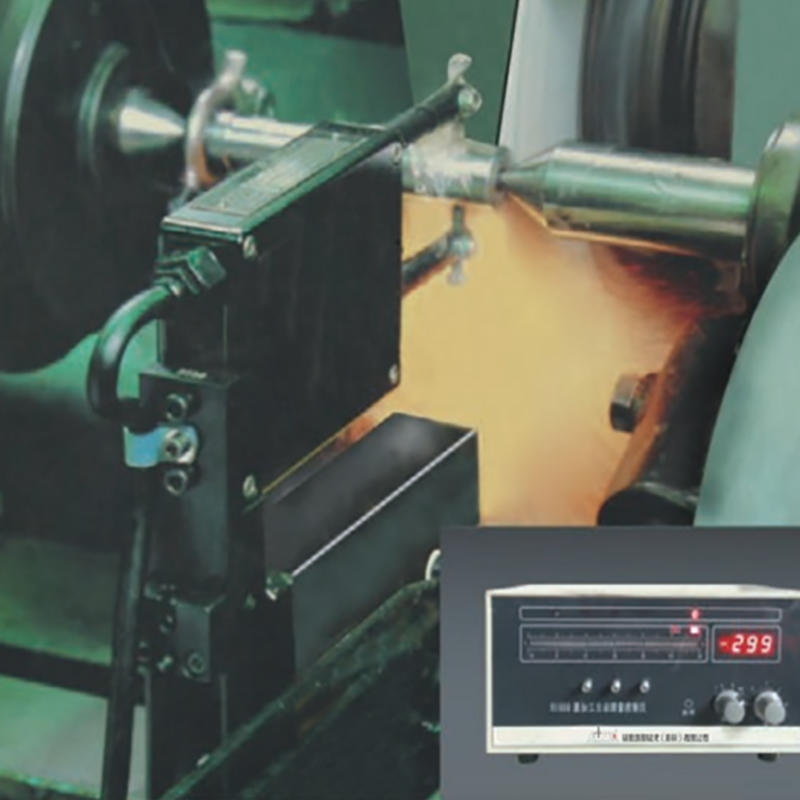
ଉତ୍ପାଦ ପ୍ରୟୋଗ
ଭବିଷ୍ୟବାଣୀ ନିୟନ୍ତ୍ରଣ ପାଇଁ ପ୍ରଯୁଜ୍ୟ ନମନୀୟ ସିଷ୍ଟମର ଭବିଷ୍ୟବାଣୀ ନିୟନ୍ତ୍ରଣ ହେଉଛି ପ୍ରକ୍ରିୟାକରଣରେ ମାପ ଏବଂ ପ୍ରକ୍ରିୟାକରଣ ମାପକୁ ଏକତ୍ର କରି ଏକ ବନ୍ଦ-ଲୁପ୍ ମାପ ପ୍ରଣାଳୀ ଗଠନ କରିବା ଯାହା ମେସିନ୍ ଉପକରଣର ପ୍ରକ୍ରିୟାକରଣ ଅବସ୍ଥାକୁ ନିୟନ୍ତ୍ରଣ କରିବ ଏବଂ ନିଶ୍ଚିତ କରିବ ଯେ ଅପବ୍ୟବହାର ପ୍ରକ୍ରିୟାକରଣର କୌଣସି ନିୟନ୍ତ୍ରଣ ପ୍ରଣାଳୀ ନାହିଁ। ଏକ ମେସିନ୍ ଉପକରଣର ନମନୀୟ ନିୟନ୍ତ୍ରଣ ଏକ ସର୍ବନିମ୍ନ ବନ୍ଦ-ଲୁପ୍ ସିଷ୍ଟମରେ ଏକ ନିୟନ୍ତ୍ରକ ସହିତ ହାସଲ କରାଯାଇପାରିବ ଯାହା ପ୍ରକ୍ରିୟାକରଣ ଏବଂ ପରବର୍ତ୍ତୀ ପ୍ରକ୍ରିୟାକରଣ ମାପ କରିପାରିବ। କମ୍ପ୍ୟୁଟର ସହିତ ମାପ ଉପକରଣ, ଉପର ମେସିନ୍ ଏବଂ ତଳ ମେସିନ୍ ସହିତ ଅଧିକ ଯୋଗାଯୋଗ, ସ୍ୱୟଂଚାଳିତ ରେଖାର ସାମଗ୍ରିକ ଏକୀକୃତ ପରିଚାଳନାକୁ ଅନୁଭବ କରିପାରିବ। ତେଣୁ ଆପଣ ଅପବ୍ୟବହାର ପ୍ରକ୍ରିୟାକରଣ ବିନା ଏକ ଅତ୍ୟନ୍ତ ଦକ୍ଷ ସ୍ୱୟଂଚାଳିତ ଉତ୍ପାଦନ ରେଖା ନିର୍ମାଣ କରିପାରିବେ। ଏହା ସହିତ, ଚିହ୍ନଟ ପାଇଁ ବିଭିନ୍ନ ବାହ୍ୟ ବସ୍ତୁ ସହିତ ସମ୍ବନ୍ଧିତ ବିଭିନ୍ନ ସେନ୍ସର, ନିଶ୍ଚିତ କରିପାରିବେ ଯେ ସମଗ୍ର ସିଷ୍ଟମ୍ ବାହ୍ୟ ଦ୍ୱାରା ପ୍ରଭାବିତ ନୁହେଁ।
ସକ୍ରିୟ ମାପର ଇଣ୍ଡିଂ ପ୍ରକ୍ରିୟା ପ୍ରକ୍ରିୟାକରଣ ସମୟରେ, ମାପକ ଉପକରଣ ଯେକୌଣସି ସମୟରେ ୱର୍କପିସ୍ ମାପ କରେ ଏବଂ ମାପ ଫଳାଫଳକୁ ନିୟନ୍ତ୍ରକରେ ପ୍ରବେଶ କରେ। ପୂର୍ବ-ସେଟ୍ ସିଗନାଲ ବିନ୍ଦୁରେ, ନିୟନ୍ତ୍ରକ ମେସିନ୍ ଟୁଲର କାର୍ଯ୍ୟ ନିୟନ୍ତ୍ରଣ କରିବା ପାଇଁ ଏକ ସିଗନାଲ ପଠାଏ। ଉଦାହରଣ ସ୍ୱରୂପ, ଗ୍ରାଇଣ୍ଡିଂ ପ୍ରକ୍ରିୟାରେ, ମୋଟା ଗ୍ରାଇଣ୍ଡିଂ ଫିଡ୍, ଯେତେବେଳେ ପ୍ରଥମ ଆକାରର ସିଗନାଲ ବିନ୍ଦୁ, ନିୟନ୍ତ୍ରକ ସଙ୍କେତ ଦିଏ, ମେସିନ୍ ଟୁଲ୍ ମୋଟା ଗ୍ରାଇଣ୍ଡିଂରୁ ସୂକ୍ଷ୍ମ ଗ୍ରାଇଣ୍ଡିଂକୁ ସ୍ୱିଚ୍ କରେ, ଯେତେବେଳେ ଦ୍ୱିତୀୟ ଆକାରର ସିଗନାଲ ବିନ୍ଦୁ, ମେସିନ୍ ଟୁଲ୍ ସୂକ୍ଷ୍ମ ଗ୍ରାଇଣ୍ଡିଂ ଫିଡ୍ ରୁ ହାଲୁକା ଗ୍ରାଇଣ୍ଡିଂ (ସ୍ପାର୍କ ଗ୍ରାଇଣ୍ଡିଂ ନାହିଁ), ଯେତେବେଳେ ତୃତୀୟ ସିଗନାଲ ବିନ୍ଦୁ, ୱର୍କପିସ୍ ପ୍ରିସେଟ୍ ଆକାରକୁ, ଗ୍ରାଇଣ୍ଡିଂ ଚକ ଶୀଘ୍ର ଫେରି ଆସେ, ଏବଂ ପରବର୍ତ୍ତୀ ଚକ୍ରର ଷ୍ଟାଣ୍ଡବାଏ ସ୍ଥିତିରେ ପ୍ରବେଶ କରେ।
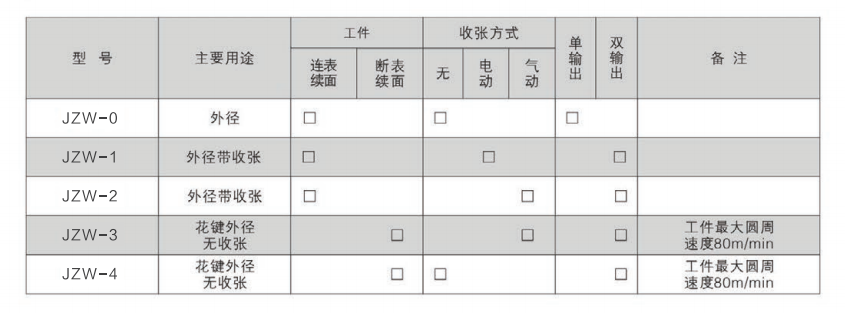
ଉତ୍ପାଦ ପାରାମିଟର୍
ଉତ୍ପାଦ ଭିଡିଓ

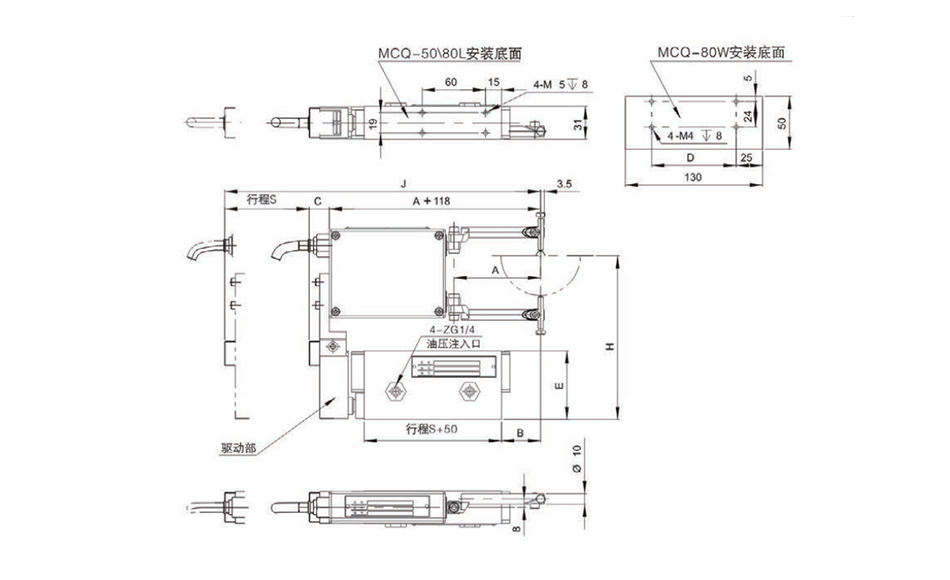
ଉତ୍ପାଦ ଆକାର